基于TogetherROS.Auto的地平线智能驾驶软件开发范式探索 技术公开课全程实录与开发实践
在智能驾驶技术飞速发展的今天,高效、可靠且可扩展的软件框架是推动行业创新的核心引擎。地平线推出的TogetherROS.Auto,正是为智能驾驶场景量身打造的高性能机器人操作系统。本文旨在深入解析基于TogetherROS.Auto的智能驾驶软件开发范式,并结合技术公开课的核心理念,为开发者勾勒出一条清晰的软件技术开发路径。
一、TogetherROS.Auto:智能驾驶的软件基石
TogetherROS.Auto并非简单的ROS 2分支,而是地平线基于多年车载计算实践,深度融合了车规级安全、实时性需求与AI计算特性而深度优化的产物。它针对自动驾驶的高并发、低延迟、高可靠性挑战,在通信中间件、资源调度、工具链等方面进行了大量增强与创新。其核心价值在于,为开发者提供了一个从芯片到应用的全栈式开发平台,显著降低了将算法模型部署到车规级硬件上的复杂度与门槛。
二、核心开发范式:从“软硬协同”到“应用迭代”
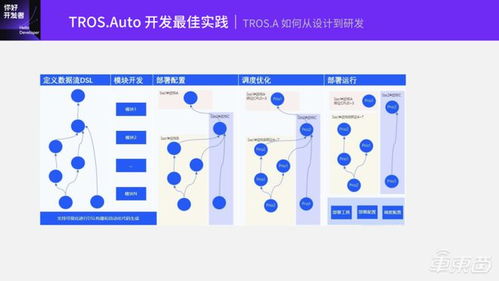
基于TogetherROS.Auto的开发,遵循一套独特的范式,其精髓可概括为以下几点:
- 软硬一体优化:开发始于对地平线征程系列芯片算力与能效的理解。TogetherROS.Auto深度集成了BPU(Brain Processing Unit)的异构计算能力,提供了高效的AI推理框架与工具链(如模型转换、性能分析),确保算法能充分发挥硬件性能。
- 组件化与模块化:系统倡导基于节点的组件化设计。感知、定位、规划、控制等模块可作为独立的节点进行开发与测试,通过TogetherROS.Auto提供的高性能通信层(如Cyclone DDS的优化版本)进行数据交换。这种松耦合架构极大地提升了代码复用率和团队协作效率。
- 车规级安全与可靠:框架内嵌了功能安全与信息安全的设计考量,提供了诸如生命周期管理、健康监控、冗余通信等机制,帮助开发者构建符合ASIL等级要求的软件模块。
- 工具链驱动的敏捷开发:强大的工具链是范式落地的关键。从可视化调试工具(如增强版的Rviz2)、数据录制回放(Bag)、到性能剖析与系统监控,一套完整的工具集支持开发者进行快速迭代与问题定位。
三、技术公开课实录精要:开发者上手指南
在面向开发者的技术公开课中,地平线专家通常聚焦于以下实践环节:
- 环境搭建与初体验:指导如何快速在X86或征程开发板上部署TogetherROS.Auto运行环境,创建第一个工作空间与功能包,并运行示例节点,建立直观认知。
- 关键概念深度剖析:深入讲解节点、话题、服务、动作在自动驾驶场景下的典型应用模式,以及QoS(服务质量)策略如何保障关键数据(如激光雷达点云、控制指令)的实时可靠传输。
- AI模型集成实战:演示如何使用模型转换工具将训练好的深度学习模型(如YOLO、BEV感知模型)高效部署到征程芯片上,并通过ROS节点封装,使其能够无缝接入感知流水线。
- 系统调试与性能优化:分享利用内置工具进行系统级跟踪、CPU/BPU负载分析、通信延迟测量的方法,从而定位瓶颈并优化系统性能。
- 仿真与实车对接:介绍如何利用TogetherROS.Auto的接口与常用仿真环境(如CARLA、LG SVL)进行联调,并平滑过渡到实车数据闭环开发。
四、展望:构建开放共赢的开发者生态
地平线通过TogetherROS.Auto及配套的技术布道,其长远目标在于构建一个繁荣的智能驾驶开发生态。这套开发范式不仅降低了先进自动驾驶技术的研发门槛,更通过标准化接口和丰富示例,激励广大开发者和合作伙伴贡献算法模块与应用场景,共同加速智能驾驶技术的创新与落地。
基于TogetherROS.Auto的智能驾驶软件开发范式,代表了一种将顶尖AI计算芯片、车规级操作系统框架与具体应用需求深度融合的系统工程方法。对于开发者而言,深入掌握这一范式,意味着掌握了高效开发高性能、高可靠性自动驾驶软件系统的钥匙。持续关注并参与地平线的技术公开与社区互动,将是开发者在这一前沿领域保持竞争力的重要途径。
如若转载,请注明出处:http://www.kzgbh.com/product/39.html
更新时间:2026-06-19 03:13:49